Tối ưu hóa bộ điều khiển PI trong điều khiển động cơ điện một chiều bằng FRIT
- Thứ tư - 28/07/2021 23:40
- In ra
- Đóng cửa sổ này
Động cơ điện một chiều (DC motor) là cơ cấu chấp hành rất phổ biến trong các ngành công nghiệp (nhà máy cán thép, nhà máy xi măng, cánh tay robot,…). Điều khiển động cơ DC là một trong những bài toán cơ bản của lĩnh vực điều khiển tự động, trong đó, PI là bộ điều khiển thường được sử dụng do có cấu trúc đơn giản và bền vững. Chất lượng của hệ thống điều khiển phụ thuộc rất lớn vào các thông số KP, KI của bộ điều khiển. Phương pháp thông dụng để xác định các thông số này là phương pháp Ziegler-Nichols. Tuy nhiên, trong quá trình vận hành, do ảnh hưởng của nhiễu và các sai số, thông số của bộ điều khiển cần được điều chỉnh để đáp ứng các yêu cầu chất lượng của hệ thống. Để giải quyết công việc này, người kỹ sư hoặc là phải tổng hợp lại hệ thống (nhận dạng lại đối tượng, sau đó dựa vào mô hình toán học của đối tượng để tổng hợp bộ điều khiển) hoặc là dựa theo kinh nghiệm để điều chỉnh các thông số. Như vậy, việc tìm ra thông số tối ưu của bộ điều khiển là một công việc khó khăn, đòi hỏi kinh nghiệm, và tốn nhiều công sức. Sử dụng trực tiếp các dữ liệu thực nghiệm để tổng hợp bộ điều khiển, bỏ qua bước nhận dạng đối tượng là hướng đi mới, có hiệu quả, và hứa hẹn nhiều triển vọng trong lĩnh vực điều khiển.
FRIT (Fictitious Reference Iterative Tuning) được đề xuất bởi Souma và cộng sự năm 2004, sau đó được nghiên cứu phát triển và ứng dụng trong nhiều bài toán khác nhau như: nhận dạng đối tượng (Kaneko & cs., 2005), điều chỉnh tối ưu với cấu trúc IMC (Nguyen Thi Hien, 2013),... FRIT là phương pháp sử dụng trực tiếp một tập dữ liệu vào/ra duy nhất (one-shot experimental data) của hệ thống để điều chỉnh thông số của bộ điều khiển sao cho hệ thống đạt được các chất lượng yêu cầu, thể hiện bằng một mô hình mẫu cho trước. FRIT không đòi hỏi mô hình toán học của đối tượng điều khiển (model-free), do đó tránh được các khó khăn trong quá trình nhận dạng đối tượng. So với các phương pháp khác (sử dụng trực tiếp dữ liệu thực nghiệm để điều chỉnh thông số bộ điều khiển), FRIT có nhiều ưu điểm: yêu cầu chỉ một tập dữ liệu vào/ra của hệ thống (so với IFT – Iterative feedback tuning (Hjalmarsson & cs., 1998) - yêu cầu dữ liệu của nhiều lần thực nghiệm), hàm mục tiêu trực quan, dễ hiểu hơn (so với phương pháp VRFT - Virtual reference feeback tuning (Campi & cs., 2002) - cùng yêu cầu một tập dữ liệu thực nghiệm). Do đó, sử dụng FRIT để tối ưu hóa bộ điều khiển PID cho phép tiết kiệm tối đa thời gian, giảm thiểu các chi phí. Ngoài ra, việc sử dụng trực tiếp dữ liệu vào-ra của hệ thống trong việc tổng hợp bộ điều khiển cũng giúp chúng ta tính đến các ảnh hưởng của nhiễu, từ đó có định hướng trong việc giảm ảnh hưởng của các nhiễu này, nâng cao chất lượng của hệ thống điều khiển.
Trong nghiên cứu này, chúng tôi xây dựng thuật toán sử dụng FRIT để điều chỉnh tối ưu thông số của các bộ điều khiển PI trong hệ thống điều khiển tốc độ của động cơ DC. Hệ thống sử dụng động cơ DC 0,3 kW được điều chỉnh tốc độ bởi bộ biến đổi băm xung điện áp, sử dụng các IGBT (hình 1). Hệ thống được kết nối với máy tính qua cáp LM9040 và thu thập dữ liệu bằng phần mềm SO6006 – 5J do hãng Lucas Nülle, Đức cung cấp. Tốc độ của động cơ được đo bởi tốc độ kế 1V/1000 vòng/phút và được gửi tới máy tính. Khảo nghiệm được thực hiện trong 10s với thời gian lấy mẫu là 0,033s.
Từ một bộ thông số thiết lập ban đầu của các bộ điều khiển: dữ liệu thực nghiệm cho thấy đặc tính đầu ra của hệ thống (đặc tính tốc độ) có dao động và độ quá điều chỉnh lớn (hình 2). Áp dụng thuật toán đã xây dựng, thông số tối ưu của các bộ điều khiển được xác định: Kết quả thực nghiệm cho thấy, tốc độ của động cơ DC với bộ thông số này có đặc tính khá tốt, giảm độ dao động và loại bỏ được độ quá điều chỉnh (so với đặc tính của hệ thống với bộ thông số điều khiển ban đầu ) (hình 3).
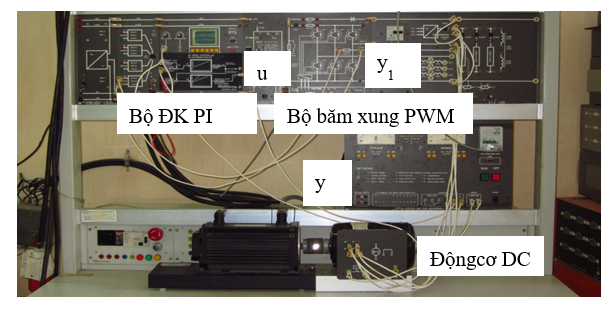 |
| Hình 1. Hệ thống điều khiển tốc độ động cơ DC |
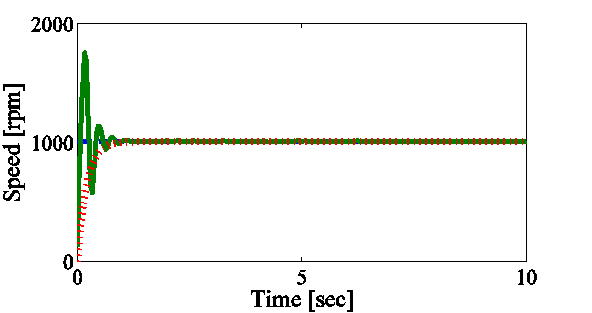 |
| Hình 2. Đặc tính tốc độ của hệ thống ứng với bộ thông số (điều khiển) ban đầu (đường nét liền), đặc tính tốc độ mong muốn (nét chấm), và tín hiệu đặt (nét gạch). |
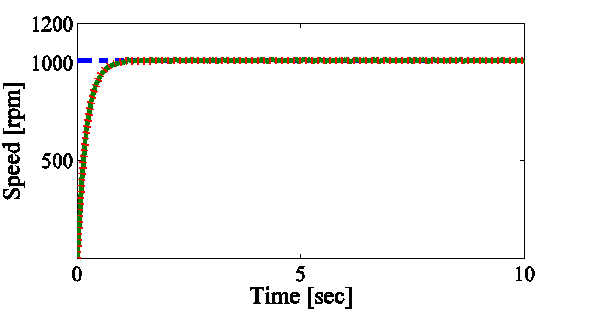 |
| Hình 3. Đặc tính tốc độ của hệ thống ứng với bộ thông số tối ưu (đường nét liền), đặc tính tốc độ mong muốn (nét chấm), và tín hiệu đặt (nét gạch). |
TÀI LIỆU THAM KHẢO
1. Campi M. C., A. Lecchini, and S. M. Savaresi (2002). Virtual reference feedback tuning: A direct method for design of feedback controllers. Automatica, Vol. 38, No. 8, pp. 1337–1346.
2. Kaneko O., S. Souma, T. Fujii (2005). A fictitious reference iterative tuning (FRIT) in the two-degree of freedom control scheme and its application to closed loop system identification. Proceedings of the 16th IFAC World Congress, pp. 104–109.
3. Nguyen Thi Hien (2013). Studies on data – driven approach in internal model control, PhD. dissertation, Kanazawa University, Japan.
4. Nguyen Thi Hien and Kaneko O. (2016). Fictitious reference iterative tuning for cascade PI controllers of DC motor speed control systems. IEEJ Transactions on Electronics, Information and Systems, Vol. 136, No. 5, pp. 710–714.
5. Hjalmarsson H., M. Gevers, S. Gunnarsson, and O. Lequin (1998). Iterative feedback tuning: Theory and application. IEEE Control Systems Magazine, Vol. 18, No. 4, pp. 26–41.
6. Souma S., O. Kaneko and T. Fujii (2004). A new method of controller parameter tuning based on input-output data – fictitious reference iterative tuning (FRIT). Proceedings of the 8th IFAC Workshop on Adaptation and Learning Control and Signal Processing (ALCOSP 04), pp. 788–794.
7. Tài liệu hướng dẫn gói thiết bị pha C của Lucas-Nülle. Converter drivers with DC motors – SO5159-8M. Lucas-Nülle GmbH, 50170 Kerpen, Germany.
Nguyễn Thị Hiên - Khoa Cơ Điện