Ban Khoa Học Và Công Nghệ - Học Viện Nông Nghiệp Việt Nam
Phần mềm phối hợp khẩu phần ăn cho lợn, gà
- 11/04/2024 03:55:05 AM
- Đã xem: 115
- Phản hồi: 0
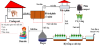
Mô hình 2 trong 1 cho trang trại chăn nuôi lợn, hướng đi bền vững trong định hướng vừa phát triển kinh tế và đảm bảo yếu tố an toàn môi trường
- 05/08/2021 11:58:56 PM
- Đã xem: 7796
- Phản hồi: 0
Nông nghiệp tuần hoàn nói chung và chăn nuôi lợn tuần hoàn nói riêng là hoạt động sản xuất không chất thải, không phế phẩm; ứng dụng kỹ thuật truyền thống và những tiến bộ khoa học để tái sử dụng và quay vòng phụ phẩm, chất thải trong quá trình sản xuất thành giá trị hữu ích trong nông nghiệp, góp phần bảo vệ và tái sinh môi trường. Đây là hướng đi bền vững trong định hướng vừa phát triển kinh tế và đảm bảo yếu tố an toàn môi trường. Xuất phát từ mục tiêu đó, nhóm các nhà khoa học của Học viện Nông nghiệp Việt Nam (đứng đầu là TS. Cao Trường Sơn) đã phát triển, thiết kế mô hình chăn nuôi lợn tuần hoàn trên cơ sở 2 nguyên lý cơ bản là Nguyên lý về kinh tế tuần hoàn và nguyên lý sinh thái.

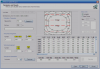
Tối ưu hóa bộ điều khiển PI trong điều khiển động cơ điện một chiều bằng FRIT
- 28/07/2021 11:40:18 PM
- Đã xem: 3535
- Phản hồi: 0
Động cơ điện một chiều (DC motor) là cơ cấu chấp hành rất phổ biến trong các ngành công nghiệp (nhà máy cán thép, nhà máy xi măng, cánh tay robot,…). Điều khiển động cơ DC là một trong những bài toán cơ bản của lĩnh vực điều khiển tự động, trong đó, PI là bộ điều khiển thường được sử dụng do có cấu trúc đơn giản và bền vững. Chất lượng của hệ thống điều khiển phụ thuộc rất lớn vào các thông số KP, KI của bộ điều khiển. Phương pháp thông dụng để xác định các thông số này là phương pháp Ziegler-Nichols. Tuy nhiên, trong quá trình vận hành, do ảnh hưởng của nhiễu và các sai số, thông số của bộ điều khiển cần được điều chỉnh để đáp ứng các yêu cầu chất lượng của hệ thống. Để giải quyết công việc này, người kỹ sư hoặc là phải tổng hợp lại hệ thống (nhận dạng lại đối tượng, sau đó dựa vào mô hình toán học của đối tượng để tổng hợp bộ điều khiển) hoặc là dựa theo kinh nghiệm để điều chỉnh các thông số. Như vậy, việc tìm ra thông số tối ưu của bộ điều khiển là một công việc khó khăn, đòi hỏi kinh nghiệm, và tốn nhiều công sức. Sử dụng trực tiếp các dữ liệu thực nghiệm để tổng hợp bộ điều khiển, bỏ qua bước nhận dạng đối tượng là hướng đi mới, có hiệu quả, và hứa hẹn nhiều triển vọng trong lĩnh vực điều khiển.
Lựa chọn giải pháp chiếu sáng hiệu quả, tiết kiệm cho phòng học trong Học viện Nông nghiệp Việt Nam
- 28/07/2021 11:17:05 PM
- Đã xem: 1478
- Phản hồi: 0

Ứng dụng chế phẩm vi sinh vật quang dưỡng trong sản xuất rau an toàn trên địa bàn tỉnh Hải Dương
- 27/07/2021 04:05:32 AM
- Đã xem: 3088
- Phản hồi: 0
SẢN PHẨM KHOA HỌC CÔNG NGHỆ- KHOA THÚ Y (2)
- 26/05/2017 06:32:53 AM
- Đã xem: 2570
- Phản hồi: 0
SẢN PHẨM KHOA HỌC CÔNG NGHỆ- KHOA MÔI TRƯỜNG GIAI ĐOẠN 2012-2016
- 26/05/2017 06:31:57 AM
- Đã xem: 1811
- Phản hồi: 0
SẢN PHẨM KHOA HỌC CÔNG - KHOA CHĂN NUÔI (2)
- 26/05/2017 06:31:21 AM
- Đã xem: 1663
- Phản hồi: 0
SẢN PHẨM KHOA HỌC CÔNG - KHOA CHĂN NUÔI GIAI ĐOẠN 2012-2016
- 26/05/2017 06:30:04 AM
- Đã xem: 1635
- Phản hồi: 0
SẢN PHẨM KHOA HỌC CÔNG NGHỆ KHOA THÚ Y GIAI ĐOẠN 2012-2016
- 26/05/2017 06:29:27 AM
- Đã xem: 1792
- Phản hồi: 0
SẢN PHẨM KHOA HỌC CÔNG - KHOA QUẢN LÝ ĐẤT ĐAI GIAI ĐOẠN 2012-2016
- 26/05/2017 06:28:45 AM
- Đã xem: 1194
- Phản hồi: 0
SẢN PHẨM KHOA HỌC CÔNG - KHOA CÔNG NGHỆ SINH HỌC GIAI ĐOẠN 2012-2016
- 26/05/2017 06:27:56 AM
- Đã xem: 1255
- Phản hồi: 0
SẢN PHẨM KHOA HỌC CÔNG - KHOA CÔNG NGHỆ THỰC PHẨM GIAI ĐOẠN 2012-2016
- 26/05/2017 06:26:48 AM
- Đã xem: 1192
- Phản hồi: 0
-
 Một số website tra cứu về tạp chí khoa học
Một số website tra cứu về tạp chí khoa học
-
 Thông báo số 2 về việc Gia hạn thời gian nộp tóm tắt Hội nghị Quốc tế Nông nghiệp và Môi trường bền vững - Lần 5 năm 2024 (SAE 2024)
Thông báo số 2 về việc Gia hạn thời gian nộp tóm tắt Hội nghị Quốc tế Nông nghiệp và Môi trường bền vững - Lần 5 năm 2024 (SAE 2024)
-
 Thông báo Kêu gọi đề xuất nhiệm vụ khoa học và công nghệ cấp quốc gia thược Chương trình phát triển tài sản trí tuệ dự kiến thực hiện từ năm 2025
Thông báo Kêu gọi đề xuất nhiệm vụ khoa học và công nghệ cấp quốc gia thược Chương trình phát triển tài sản trí tuệ dự kiến thực hiện từ năm 2025
-
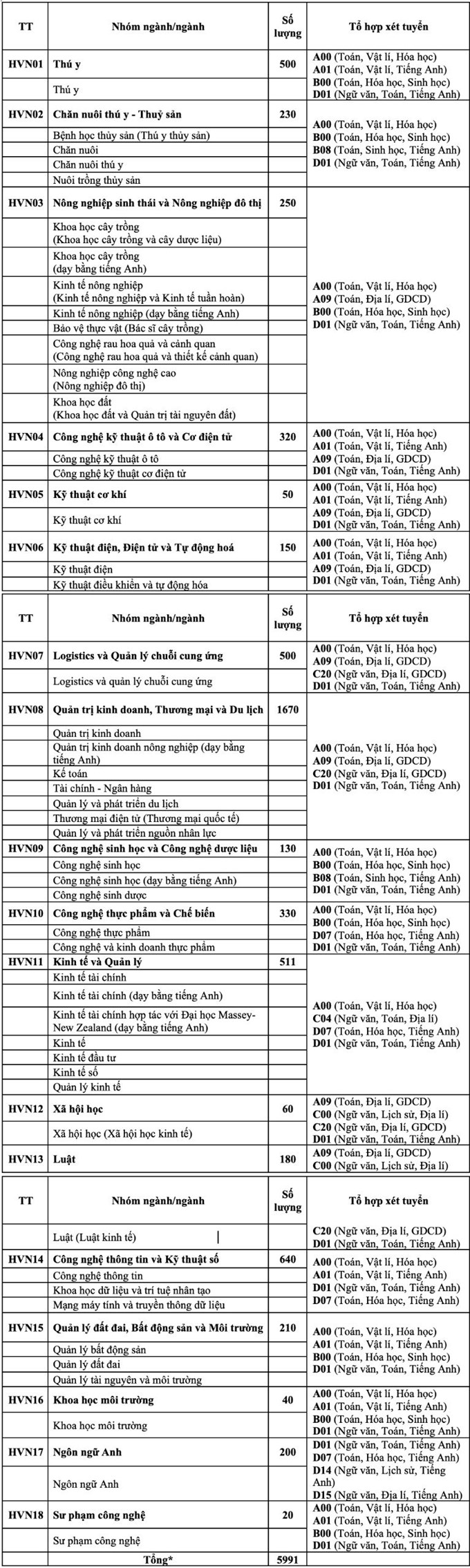 Thông báo tuyển sinh đại học hệ chính quy năm 2024
Thông báo tuyển sinh đại học hệ chính quy năm 2024
-
Kế hoạch tổ chức các sự kiện chào mừng “Ngày Khoa học và Công nghệ Việt Nam - 18 tháng 5”
-
 Với công nghệ này, chỉ cần ngồi nhà lướt smartphone cũng giám sát, theo dõi đàn ong lấy mật cả vạn "quân"
Với công nghệ này, chỉ cần ngồi nhà lướt smartphone cũng giám sát, theo dõi đàn ong lấy mật cả vạn "quân"
-
 Học viện Nông nghiệp Việt Nam ứng dụng cơ giới hóa đồng bộ các khâu trong sản xuất đậu tương
Học viện Nông nghiệp Việt Nam ứng dụng cơ giới hóa đồng bộ các khâu trong sản xuất đậu tương
-
 Nghiên cứu thiết kế và chế tạo máy làm đất bảo tồn cho cây trồng cạn
Nghiên cứu thiết kế và chế tạo máy làm đất bảo tồn cho cây trồng cạn
-
 Giải pháp đẩy mạnh ứng dụng công nghệ sau thu hoạch
Giải pháp đẩy mạnh ứng dụng công nghệ sau thu hoạch
-
 Ứng dụng kỹ thuật kiểm toán chất thải và đề xuất các biện pháp giảm thiểu chất thải trong chăn nuôi lợn
Ứng dụng kỹ thuật kiểm toán chất thải và đề xuất các biện pháp giảm thiểu chất thải trong chăn nuôi lợn
-
 Hội thảo “Giới thiệu một số phương pháp phân tích dữ liệu và thống kê ứng dụng”
Hội thảo “Giới thiệu một số phương pháp phân tích dữ liệu và thống kê ứng dụng”
-
 Hội thảo “Xác định tiêu chí khảo sát thực trạng các mô hình nông nghiệp sinh thái bền vững gắn với du lịch trải nghiệm trên địa bàn tỉnh Hải Dương”
Hội thảo “Xác định tiêu chí khảo sát thực trạng các mô hình nông nghiệp sinh thái bền vững gắn với du lịch trải nghiệm trên địa bàn tỉnh Hải Dương”
-
 Khai mạc khóa tập huấn “Chuỗi giá trị thực phẩm 2022” tại Học viện Nông nghiệp Việt Nam
Khai mạc khóa tập huấn “Chuỗi giá trị thực phẩm 2022” tại Học viện Nông nghiệp Việt Nam
-
 Hội thảo xây dựng khung phân tích: Đánh giá thực trạng và đề xuất giải pháp thúc đẩy nông nghiệp tuần hoàn tại Việt Nam
Hội thảo xây dựng khung phân tích: Đánh giá thực trạng và đề xuất giải pháp thúc đẩy nông nghiệp tuần hoàn tại Việt Nam
-
 Hội nghị tổng kết dự án “Chăn nuôi thâm canh bò thịt trong các hệ thống canh tác đất dốc vùng miền núi Tây Bắc Việt Nam”
Hội nghị tổng kết dự án “Chăn nuôi thâm canh bò thịt trong các hệ thống canh tác đất dốc vùng miền núi Tây Bắc Việt Nam”
-
 Học viện Nông nghiệp Việt Nam giành giải Nhì tại Giải thưởng Sinh viên Nghiên cứu Khoa học - Euréka lần thứ 22
Học viện Nông nghiệp Việt Nam giành giải Nhì tại Giải thưởng Sinh viên Nghiên cứu Khoa học - Euréka lần thứ 22
-
 Học viện đạt giải thưởng nhất toàn đoàn Hội nghị khoa học công nghệ tuổi trẻ các trường đại học và cao đẳng khối Nông - Lâm - Ngư - Thủy...
Học viện đạt giải thưởng nhất toàn đoàn Hội nghị khoa học công nghệ tuổi trẻ các trường đại học và cao đẳng khối Nông - Lâm - Ngư - Thủy...
-
 Thêm một nhà giáo được trao tặng danh hiệu Anh hùng Lao động: Cống hiến tâm lực cho giảng dạy, nghiên cứu khoa học
Thêm một nhà giáo được trao tặng danh hiệu Anh hùng Lao động: Cống hiến tâm lực cho giảng dạy, nghiên cứu khoa học
-
Mô hình 2 trong 1 cho trang trại chăn nuôi lợn, hướng đi bền vững trong định hướng vừa phát triển kinh tế và đảm bảo yếu tố an toàn môi trường
-
Tối ưu hóa bộ điều khiển PI trong điều khiển động cơ điện một chiều bằng FRIT
-
Lựa chọn giải pháp chiếu sáng hiệu quả, tiết kiệm cho phòng học trong Học viện Nông nghiệp Việt Nam
-
Ứng dụng chế phẩm vi sinh vật quang dưỡng trong sản xuất rau an toàn trên địa bàn tỉnh Hải Dương
-
SẢN PHẨM KHOA HỌC CÔNG NGHỆ- KHOA THÚ Y (2)







- Đang truy cập6
- Hôm nay1,443
- Tháng hiện tại104,115
- Tổng lượt truy cập4,739,989